|
Научно-исследовательские опытно-конструкторские разработки ФИЗИЧЕСКАЯ МОДЕЛЬ ГИБРИДНОГО ДВИГАТЕЛЯ С РОТОРНЫМ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ |
||
Реферат Разработана физическая модель гибридного двигателя (ГД), которая может быть использована при проектировании силовых установок транспортных средств. Модель представляет собой роторный двигатель внутреннего сгорания (ДВС) возвратно - вращательного типа, соединенный при помощи кривошипно-шатунного механизма с мотор-генератором. Найдены геометрические соотношения элементов кривошипно-шатунного механизма, обеспечивающие его надежную работу и необходимую амплитуду отклонений кривошипа. Введение Гибридный двигатель - энергетическая установка, в которой поршневой двигатель внутреннего сгорания соединен посредством механической трансмиссии с электрическим мотор-генератором. Гибридные двигатели были изобретены более ста лет назад, выпуска-лись серийно и устанавливались на автомобили ранних выпусков. Однако они были вытес-нены двигателями внутреннего сгорания вследствие несовершенства технологий. В настоя-щее время ГД переживают второе рождение в связи с бурным развитием высоких технологий и компьютерной техники. Современные ГД представляют собой высокотехнологичные ком-пьютеризированные устройства, которые могут устанавливаться на самые различные авто-мобили. В Германии, например, в ближайшие годы планируют окончательно отказаться от ДВС и перейти на ГД. Toyota объявила о намерении увеличить объём выпуска гибридных автомобилей до 300 тысяч в год, а к 2012 году вообще перейти исключительно на выпуск гибридов. Лондон после 2012 года будет закупать только гибридные автобусы. Преимущества системы гибридного привода включают в себя:
К недостаткам ГД необходимо отнести сравнительно небольшие КПД, моторесурс, большие габариты, вес и высокую сложность устройства. Эти недостатки в значительной степени обусловлены несовершенством существующих схем поршневых ДВС. Цель настоящей работы - разработка и исследование физической модели ГД, которая может быть использована при проектировании силовых установок автомобилей. Предложенная модель гибридного двигателя содержит роторный двигатель внутреннего сгорания возвратно-вращательного типа, соединенного посредством кривошипно-шатунного механизма с мотор-генератором. Мотор-генератор в принципе ничем не отличается от используемых в существующих ГД. Эксперименты проводятся на действующем макете, который представляет собой сис-тему из маховика, установленного на валу мотор-генератора и кривошипа, установленного на дополнительной оси с возможностью свободного качания. Маховик и кривошип связаны посредством шатуна. Предусмотрена возможность изменения геометрических параметров макета. Маховик и кривошип снабжены отдельными градусными лимбами и стрелками. Ме-тодика эксперимента заключалась в снятии зависимостей углов отклонения шатуна от углов поворота маховика мотор-генератора. Выявлялась зависимость характера полученных кри-вых от геометрических параметров кривошипно-шатунного механизма. Находились опти-мальные геометрические параметры кривошипно-шатунного механизма. Литературный обзор Растущая ценность углеводородных источников сырья заставляет автопроизводителей искать пути радикального повышения экономичности двигателей и снижения зависимости от нефтяных поставок. Одним из наиболее явных решений этого вопроса является создание двигателей, работающих на альтернативных двигателям внутреннего сгорания принципах. В источнике [1] приводится обзор современного состояния дел по этой проблеме, рассматриваются альтернативные варианты автомобильных двигателей. Немецкая компания Bosch для южноамериканских стран разработала систему, которая позволяет автомобильному двигателю работать на смеси этилового спирта и бензина, смешанных в любых пропорциях. Спирт производится из сахарного тростника. Концентрация спирта в южноамериканских автомобильных баках достигает 85%, а бензина соответственно 15%. Резкое удорожание сахара на мировых рынках во многом связано с переводом южноамериканского автопарка на этанол. В Японии активно работают над созданием универсальных двигателей, способных работать как на бензине, так и на водородном топливе. Различные эксперименты с водородными двигателями, в которых в процессе реакции сгорания водорода образуется водяной пар, привели к появлению целого семейства экспериментальных технологических решений. Во всех технологически развитых регионах мира работают над водородными электромобилями. Принцип их работы - получение электричества в ходе химической реакции между заправ-ленным в топливные элементы водородом и атмосферным кислородом. У каждого альтернативного подхода есть свои плюсы и свои минусы. Водородные автомобили требуют колоссальной инфраструктурной перестройки - каждую автозаправку надо оснастить водородными мощностями. Японцы создали пятиместный электромобиль, передвигающийся со скоростью около 400 км/ч на расстояние более трехсот километров на одной зарядке, однако его стоимость составляет несколько миллионов долларов. На рынке регулярно появляются достаточно удачные и популярные модели электромобилей. Электромобиль Tesla Roadster использует электричество из любой розетки и разгоняется до 100 км за 4 секунды. Он может проехать 400км без подзарядки. Разные виды электромобилей обладают общими недостатками - необходимостью длительной зарядки аккумуляторов, большой массой аккумуляторов, недостаточной дальностью пробега, недоступностью заправочных станций, малой надежностью и сравнительно небольшим количеством циклов заряда - разряда аккумулятора (около 1000). Недостатки электромобилей привели к поискам компромиссных путей. Многие автопроизводители стали экспериментировать с моделями, в которых электромотор сочетается либо с небольшим дизелем, либо с бензиновым двигателем. Самыми проработанными и хорошо себя зарекомендовавшими стали так называемые "гибридные двигатели" - сочетающие в себе бензиновый двигатель и электромотор. Основным их производителем является Япония, а рынком сбыта - США. Основные причины, стоящие за разработкой гибридной силовой установки - уменьшение количества вредных выбросов в атмосферу, что очень актуально именно для городского транспорта. Эта система позволяет снизить выброс сажи и углеводородов на 90%, оксидов азота - на 50%. При этом экономия топлива достигает 60% по сравнению с обычными автобусами с дизельными двигателями, а ускорение во время начала движения увеличилось на 50%. При трогании машины и при ее движении на малой скорости (до 50 км/ч) работает только электродвигатель, который получает энергию от аккумулятора. Бензиновый двигатель при этом не работает и топлива не потребляет. Отключается он и при движении накатом или длительном торможении. При увеличении скорости автомобиля требуется большая мощность, и в дело включается бензиновый двигатель. При этом связанный с ним генератор подзаряжает аккумулятор, а электродвигатель отдыхает. При резких ускорениях, например при обгоне, бензиновый двигатель и электромотор работают одновременно, что позволяет получить суммарный эффект. Управление всеми этими переключениями осуществляет бортовой компьютер, постоянно оценивающий множество параметров в реальном масштабе времени. Машины получаются сложными и дорогими, но это реальная альтернатива ДВС. В работе [2] приводится описание поршневого четырехтактного карбюраторного двигателя внутреннего сгорания. Двигатель состоит из кривошипно-шатунного и газораспреде-лительного механизмов, а также систем охлаждения, смазки, питания и зажигания. Поршневой двигатель внутреннего сгорания имеет большую массу и сложное устройство вследствие наличия в его составе кривошипно-шатунного механизма с коленчатым валом, имеющим большое количество колен. Камеры сгорания пространственно отдалены от коленчатого вала, по этой причине газораспределительный механизм имеет сложную, громоздкую и инер-ционную конструкцию. Двигатель имеет низкий крутящий момент вследствие того, что на протяжении рабочего такта величина момента сил, действующего на колено коленчатого вала со стороны поршня, возрастает от нуля до максимального значения и опять понижается до нуля. Трение поршней о стенки цилиндров уменьшает КПД и ресурс работы двигателя. Используемый в двигателе четырехтактный цикл приводит к непроизводительному износу деталей и понижению удельной мощности, поскольку на один рабочий такт приходится три холостых. Необходимо также отметить высокий уровень вибраций, возникающих при работе двигателя. Эти недостатки имеют неустранимый характер, поскольку их причины кроются в пороках принципиальной схемы поршневого ДВС. В работе [3] приводятся кривые зависимостей пути, скорости и ускорения поршня кривошипно-шатунного механизма ДВС от угла поворота маховика при его вращении с постоянной угловой скоростью (рис. 1).
Рис. 1. Путь, скорость и ускорение поршня двигателя К-750 (n=460 об/мин) Из графика для пути S следует, что вблизи "мертвых" точек, т.е. в экстремумах функция имеет незначительную скорость изменения, поршень плавно останавливается и начинает движение в обратную сторону. В эти моменты времени происходит впрыск порции горючего и его воспламенение. В районах точек перегиба функция имеет значительную скорость изменения. В эти моменты горячие газы совершают основную работу по перемещению поршня или же поршень вытесняет отработавшие газы. В патенте РК [4] приводится описание роторного ДВС возвратно-вращательного типа, который содержит камеру с внутренней рабочей поверхностью вращения, на оси симметрии которой на подшипниках расположен ротор в виде цилиндрического вала с плоскими радиальными лопатками. Рабочие поверхности могут представлять собой, например, поверхности цилиндра или сферы. Форма лопатки соответствует образующей рабочей поверхности вра-щения камеры. В пазах лопаток расположены пластины уплотнения, которые могут иметь противовесы для компенсации центробежной силы. В камере между лопатками расположены неподвижно укрепленные на корпусе перегородки с пластинами уплотнения. Перегородки делят камеру на секции, лопатки делят каждую секцию на полости. На хвостовике вала ротора закреплен кривошипно-шатунный механизм. Двигатель включает механизм газораспределения, систему жидкостного охлаждения корпуса и ротора, системы зажигания, питания и смазки. В конструкции двигателя могут широко использоваться новые технологии. ДВС отличается уменьшенным расходом топлива, пониженной токсичностью выхлопных газов, простотой конструкции, большой литровой мощностью, высоким КПД, увеличенным ресурсом и высоким крутящим моментом. Также отмечается уменьшение рабочего шума, вибраций и возможность работы двигателя на различных топливах. Физическая модель устройства Модель гибридного двигателя (рис. 2) содержит роторный двигатель внутреннего сгорания 1, соединенный посредством кривошипно-шатунного механизма 2 с мотор-генератором 3.
1 - двигатель внутреннего сгорания; 2 - кривошипно-шатунный механизм; 3 - мотор-генератор; 4 - корпус двигателя; 5 - подшипник; 6 - вал ротора двигателя; 7 - лопатка ро-тора; 8 - обмотка статора; 9 - якорь; 10 - вал мотор-генератора. Рис. 2. Фронтальный разрез гибридного двигателя Роторный двигатель 1 содержит цилиндрический корпус 4, на оси симметрии которо-го на подшипниках 5 установлен ротор в виде вала 6 с закрепленными на нем лопатками 7. Пространство, ограниченное внутренними стенками корпуса 4, образует рабочую камеру. Перегородки делят камеру на секции. Лопатки 7 имеют скользящий контакт с внутренними рабочими поверхностями корпуса и делят каждую секцию на две полости. Мотор-генератор 3 содержит обмотки 8 статора и якорь 9, установленный на валу 10 с возможностью вращения на подшипниках. В данной модели могут быть использованы все наработанные высокие технологии, в том числе компьютерные. Рассмотрим один из вариантов исполнения роторного ДВС, работающего по дизельному циклу, наглядное представление о котором дает следующий рисунок:
4 - корпус; 6 - вал ротора; 7 - лопатка ротора; 8 - пластина скользящего уплотнения лопатки; 9 - перегородка; 10 - пластины скользящего уплотнения перегородок; 11 - форсунка; 12 - впускные и выпускные клапаны. Рис. 3. Сечение рабочей камеры двигателя при положении ротора в "мертвой" точке Обозначенный на рисунке корпус 4 поделен перегородками 9 на четыре секции, вал ротора 6 укреплен на боковых крышках корпуса на подшипниках. Перегородки содержат пластины 10 скользящего уплотнения относительно рабочих поверхностей ротора. Лопатки ротора 7 содержат пластины 8 скользящего уплотнения относительно рабочих поверхностей корпуса 4. Обозначенные на рисунке выемки на перегородках, фрагменты боковых стенок камеры и боковых поверхностей лопаток образуют камеры сгорания, в которых происходит сгорание топлива. Форсунка 11 служит для впрыска порций топлива в камеру сгорания. Впускные и выпускные клапаны 12 служат для впуска порций свежего воздуха и выпуска отработавших газов.
Рис. 4. Сечение рабочей камеры двигателя при производстве такта На рис. 4 приведена схема работы ДВС, в каждой полости которого реализуется четырехтактный цикл, идентичный циклу обычного поршневого дизельного двигателя. Приведенный двигатель фактически является двухтактным, поскольку каждая полость используется дважды за цикл. Такой четырехсекционный двигатель эквивалентен восьмицилиндровому четырехтактному поршневому двигателю, причем его рабочий объем в два раза меньше. ДВС соединен при помощи кривошипно-шатунного механизма с мотор-генератором. Кривошипно-шатунный механизм состоит из маховика мотор-генератора и кривошипа ДВС, закрепленного на его хвостовике. Маховик и кривошип связаны посредством шатуна. Устройство кривошипно-шатунного механизма приведено на рис. 5.
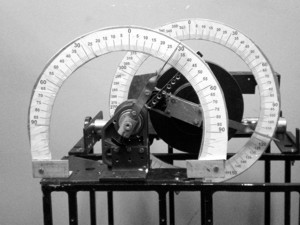
1 - маховик мотор-генератора; 2 - вал мотор-генератора; 3 - шатун; 4 - первый шарнир шатуна; 5 - второй щарнир шатуна; 6 - кривошип; 7 - вал ротора ДВС. Рис. 5. Схема, поясняющая устройство и работу кривошипно-шатунного механизма Кривошипно-шатунных механизм служит для связи ДВС и мотор-генератора с целью обмена механической энергией, реализации рабочего цикла ДВС и плавного вывода его ротора из "мертвых" точек. На рисунке маховик 1 установлен на валу 2 мотор-генератора. Первый шарнир шатуна 3 закреплен на фиксированном расстоянии от вала мотор-генератора. Шатун 4 имеет щарнирное соединение 5 с кривошипом 6, установленном на валу 7 ротора ДВС. Из схемы видно, что при вращении маховика мотор-генератора шатун совершает качательные движения. Возможны два варианта работы устройства - при вращении маховика по часовой стрелке и против нее. Путем приложения периодической силы к шатуну можно привести маховик во вращение. В простейшем случае использования представленный гибридный двигатель может работать в режиме дизель-генератора. Экспериментальная часть Для исследования кинематических характеристик кривошипно-шатунного механизма был изготовлен рабочий макет, фотография которого приведена на рисунке 6. Макет представляет собой систему из маховика, установленного на оси мотор-генератора и кривошипа, установленного на дополнительной оси с возможностью свободного качания. Маховик и кривошип связаны посредством шатуна. При помощи силовой подачи в виде шестерни с зубчатой рейкой может производиться изменение расстояния между валом мотор-генератора и осью кривошипа. На маховике выполнен ряд отверстий с шагом 5мм. для крепления шарнира шатуна. Аналогичные крепления выполнены на кривошипе с шагом 10мм. Шатун выполнен с возможностью ступенчатого изменения его длины. Маховик снабжен круговым лимбом с нанесенными градусами и стрелкой, неподвижно закрепленной на маховике. Кривошип также снабжен лимбом и стрелкой. Лимбы позволяют измерять углы с погрешностью 1 градус, что примерно соответствует приборной погрешности 1%.
Рис. 6. Фотография рабочего макета кривошипно-шатунного механизма Методика работы и ее результаты Из рисунков 3 и 4 видно, что для обеспечения штатной работы ДВС кривошипно-шатунный механизм должен обеспечивать отклонение его ротора на угол, равный примерно 70 ~ 80 градусам при условии сохранения стабильности работы. Задача состояла в том, чтобы экспериментальным путем определить необходимые для этого геометрические параметры кривошипно-шатунного механизма.
Рис. 7. Схема, поясняющая устройство макета Введены следующие обозначения геометрических параметров: a - длина шатуна, b - расстояние между осью мотор-генератора и осью кривошипа, c - расстояние между осью мотор-генератора и первым шарниром шатуна, d - расстояние между осью кривошипа и вторым шарниром шатуна, a - угол отклонения маховика мотор-генератора, b - угол отклонения кривошипа. Стабильность работы оценивалась субъективно - по легкости раскручивания маховика в ре-зультате приложения периодического усилия к шатуну. Проводилась серия экспериментов по снятию зависимостей углов отклонения шатуна от угла поворота маховика мотор-генератора при различных геометрических параметрах кривошипно-шатунного механизма. На основании полученных данных строились графики. Нетрудно видеть, что при условии вращения маховика с постоянной угловой скоростью можно принять в качестве аргумента время, поскольку угол его поворота прямо пропорционален времени Da = wDt. В этом случае можно перейти к исследованию кинематических характеристик. Был проведен ряд экспериментов по выявлении зависимости максимального угла отклонения кривошипа bmax от параметра b (см. рис. 8). Из графика видно, что кривая имеет минимум в районе b = 9,7. Отсюда вытекает возможность изменения максимального угла отклонения кривошипа путем изменения расстояния между валом ДВС и валом мотор-генератора. Таким путем можно произвольно изменять степень сжатия ДВС.
Рис. 8. Зависимость максимального угла отклонения шатуна bmax от b - расстояния между осью маховика и осью шатуна (a=0,09 м; c=0,02 м; d=0,04 м) Также было выявлено, что форма кривых, их симметричность и положение максимума сильно зависят от параметра b. В частности, положение максимума кривых смещался слева направо с увеличением параметра b. Наиболее симметричная форма кривой получилась на графике рисунка 9, который также удовлетворяет условию необходимого угла отклонения шатуна примерно в 60 градусов. Этот график был принят в качестве основного, он соответствует таким геометрическим параметрам кривошипно-шатунного механизма: a=0,09 м; b=0,09 м; c=0,02 м; d=0,04 м. Соотношения между этими параметрами можно рекомендовать в качестве ориентировочных величин.
Рис. 9. Зависимость угла отклонения шатуна b от угла поворота маховика a (a=0,09 м; b=0,09 м; c=0,02 м; d=0,04 м) Из сравнения графика рис. 9 с графиком рис. 1 для S - пути поршня видно, что кривые ведут себя практически аналогично, т.е., вблизи "мертвых" точек, в экстремумах функция имеет незначительную скорость изменения, ротор плавно останавливается и начинает движение в обратную сторону. В эти моменты времени происходит впрыск порции горючего и его воспламенение. В районах точек перегиба функция имеет значительную скорость изменения - горячие газы совершают основную работу по вращению ротора или же лопатки ротора вытесняют отработавшие газы. На основании этого можно сделать вывод, что предложенный роторный двигатель должен работать в штатном режиме. Необходимо отметить, что описанный кривошипно-шатунный механизм будет испытывать при работе значительные механические нагрузки, что должно учитываться при конструировании. Во время совершения рабочего такта момент сил, прикладываемый к ротору, примерно в четыре раза превышает аналогичный момент сил от одного поршня при производстве такта поршневого двигателя. Однако, учитывая, что в уже существующие конструкции закладывается многократный запас прочности и с учетом развития новых технологий и материалов, эта трудность может быть преодолена. Заключение В результате проделанной работы были получены следующие результаты: 1. Разработана физическая модель гибридного двигателя, содержащая роторный двигатель внутреннего сгорания, соединенный посредством кривошипно-шатунного механизма с мо-тор-генератором. 2. Создан действующий макет, представляющий собой систему из маховика, установленного на валу мотор-генератора, связанного посредством шатуна с кривошипом. 3. Получены данные о зависимости углов отклонения шатуна от углов поворота маховика при различных геометрических параметрах макета. 4. Найдены геометрические параметры кривошипно-шатунного механизма, при которых обеспечиваются необходимый угол отклонения кривошипа и устойчивость работы системы. 5. Полученные данные проанализированы и сопоставлены с данными литературных источ-ников. На основании проведенной работы можно сделать следующий вывод: 1. Предложенный кривошипно-шатунный механизм обладает свойствами, необходимыми как для штатной работы ДВС, так и для работы мотор-генератора. Возможна эффективная передача механической энергии при помощи кривошипно-шатунного механизма от ДВС к мотор-генератору и обратно. В случае использования данной модели гибридного двигателя при проектировании силовых установок транспортных средств можно добиться уменьшения массы и габаритов устройства, значительного упрощения конструкции, увеличения КПД, уменьшения рабочего шума. Источники 1. 2. К.С. Шестопалов, В.Г. Чиняев, Устройство и эксплуатация автомобиля, // Издательство ДОСААФ СССР, 1974, С. 7- 147. 3. С.Ю. Иваницкий, Б.С. Карманов, В.В. Рогожин и др., Мотоцикл, теория, конструкция, расчет, // изд. "Машиностроение", Москва 1971, С. 102 - 107, 284 - 304. 4. А.Л. Шакиров, Двигатель внутреннего сгорания, заявка № 2002/1683.1 от 27.12.02, патент РК №14025 // "Промышленная собственность" №6 2008, С 173, 174. Авторы: В.В. Дьячков, А.Л. Шакиров. |
 сбережения в результате более низкого потребления топлива;
сбережения в результате более низкого потребления топлива;